Fig.1: PRED-MPPI integrating disturbance preview into MPPI rolling dynamics with variable discretization grids.
We propose PRED-MPPI, the first MPPI variant that seamlessly integrates real-time disturbance preview and adaptive discretization for quadrotor tracking control under significant model inaccuracies and time-varying disturbances. Unlike prior MPPI variants (e.g., L1-MPPI, DA-MPPI), which assume constant or matched disturbances, PRED-MPPI leverages a high order Generalized Extended State Observer for disturbance preview and a Variable Discretization Grid (VDG) to reduce computation and control variance. The synergy enables real-time (50Hz) quadrotor control under time-varying and mismatched disturbances. Extensive comparative simulation and real-world Crazyflie experiments demonstrate substantial performance gains. In AirSim simulation, PRED-MPPI reduces computation time by over 30%, and mean RMSE by 10.3%, 13.5%, and 14.6% compared to baseline MPPI, and by 2.59%, 3.62%, and 5.80% compared to DA-MPPI across three representative scenarios. In real-world Crazyflie experiment, for ground-effect-disturbed hovering, PRED-MPPI reduces mean and standard deviation (Std) of X–Y plane error by 14.2%/17.9% and 6.03%/21.6% compared to MPPI and DA-MPPI; for fan-induced wind experiments, PRED-MPPI yields improvements of 23.4%/36.8% and 13.8%/25.0% in RMSE and tracking error Std. These results establish PRED-MPPI as the first disturbance-preview MPPI achieving real-world UAV robustness and efficiency, paving the way for deployment on resource-limited robotic platforms.
We evaluate performance of proposed and baseline algorithms on three representative trajectory primitives, zig-zag, lemniscate, and square, subjected to ramp-type disturbances that emulate time-varying external perturbations. The comparative quantitative results clearly demonstrate the superior performance of the proposed PRED-MPPI in term of computation and tracking performance, through leveraging disturbance preview technique and VDG strategy. Both simulations and experiments are conducted through Crazyflie trajectory tracking to validate the algorithm and answer the following questions:
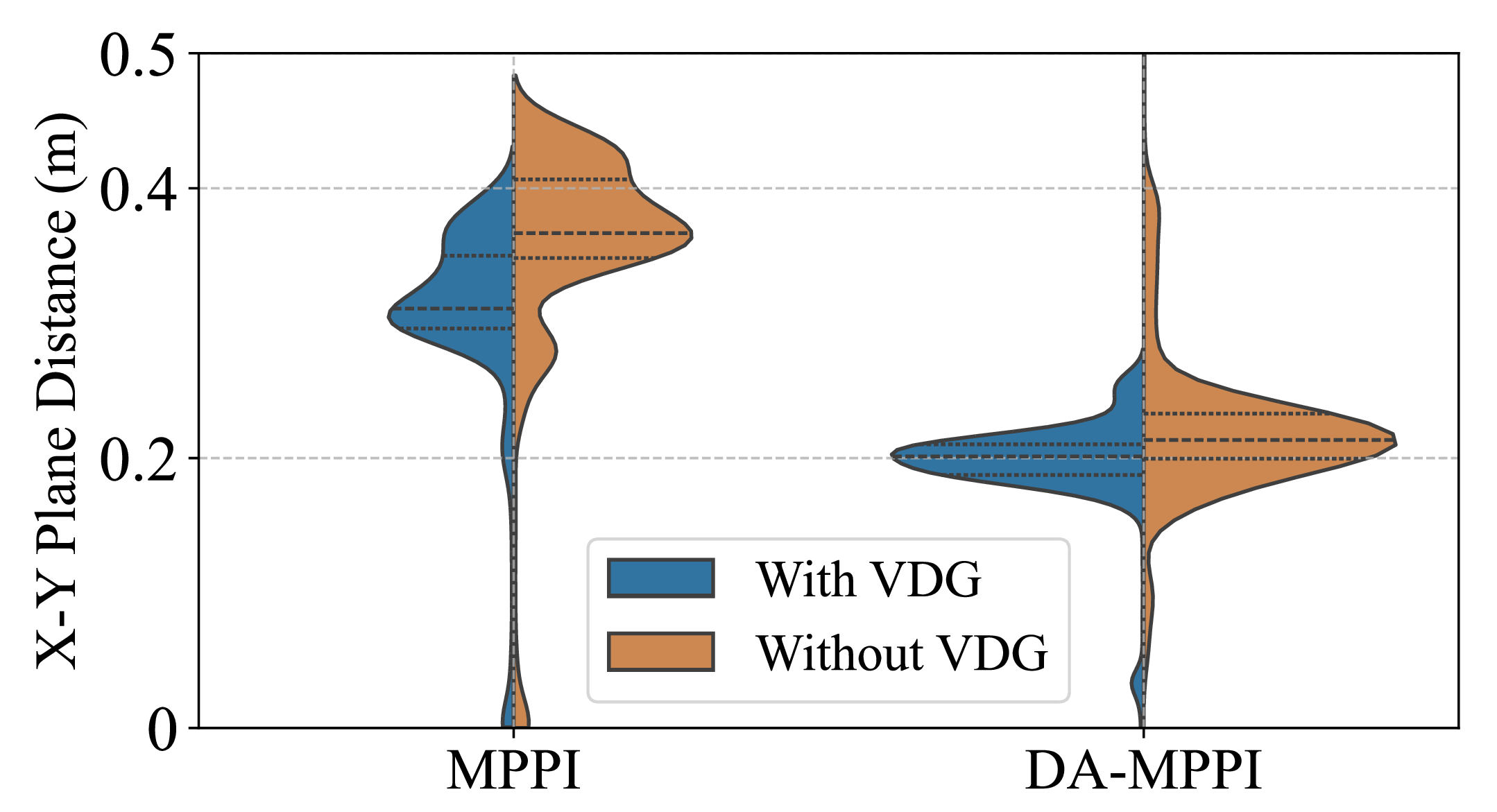
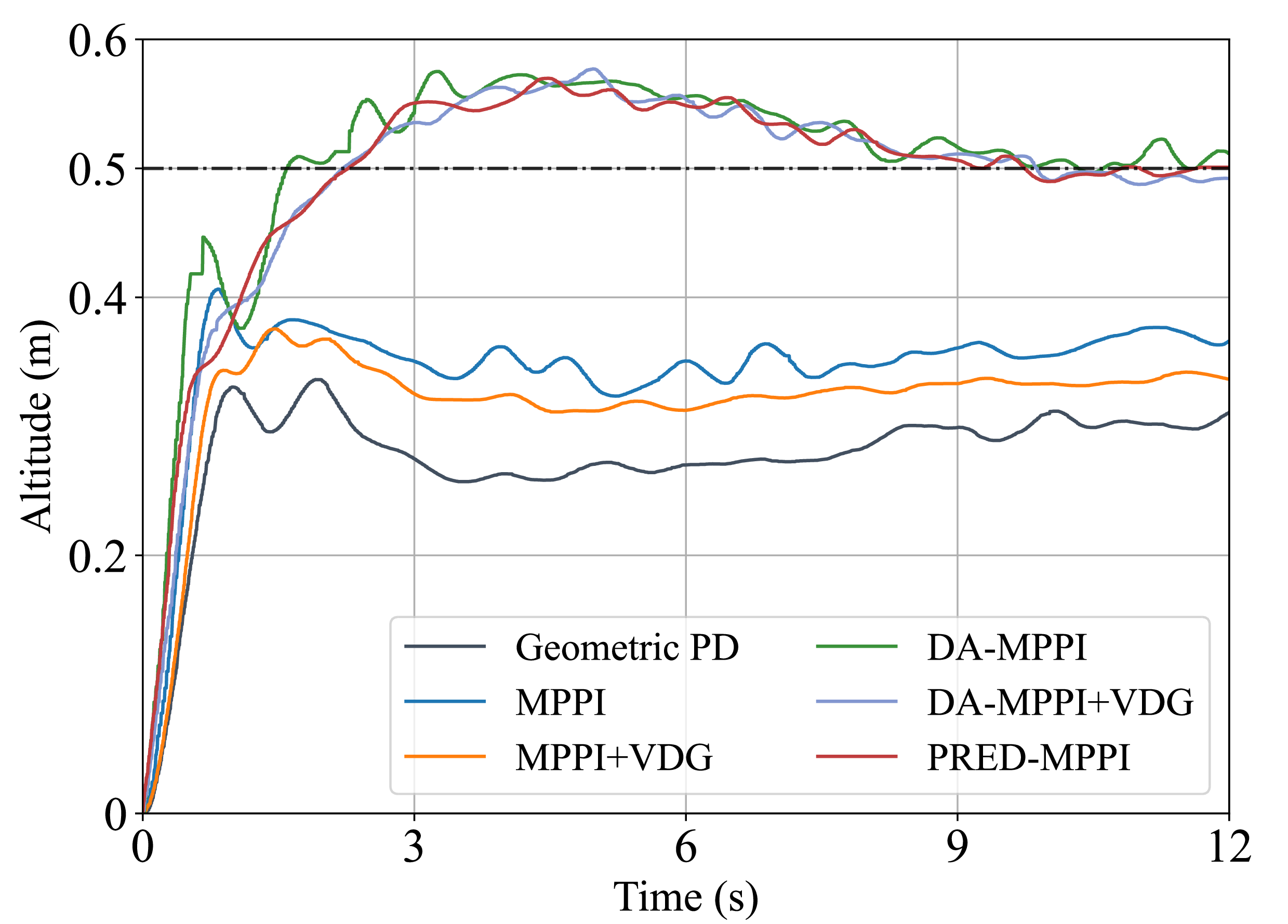
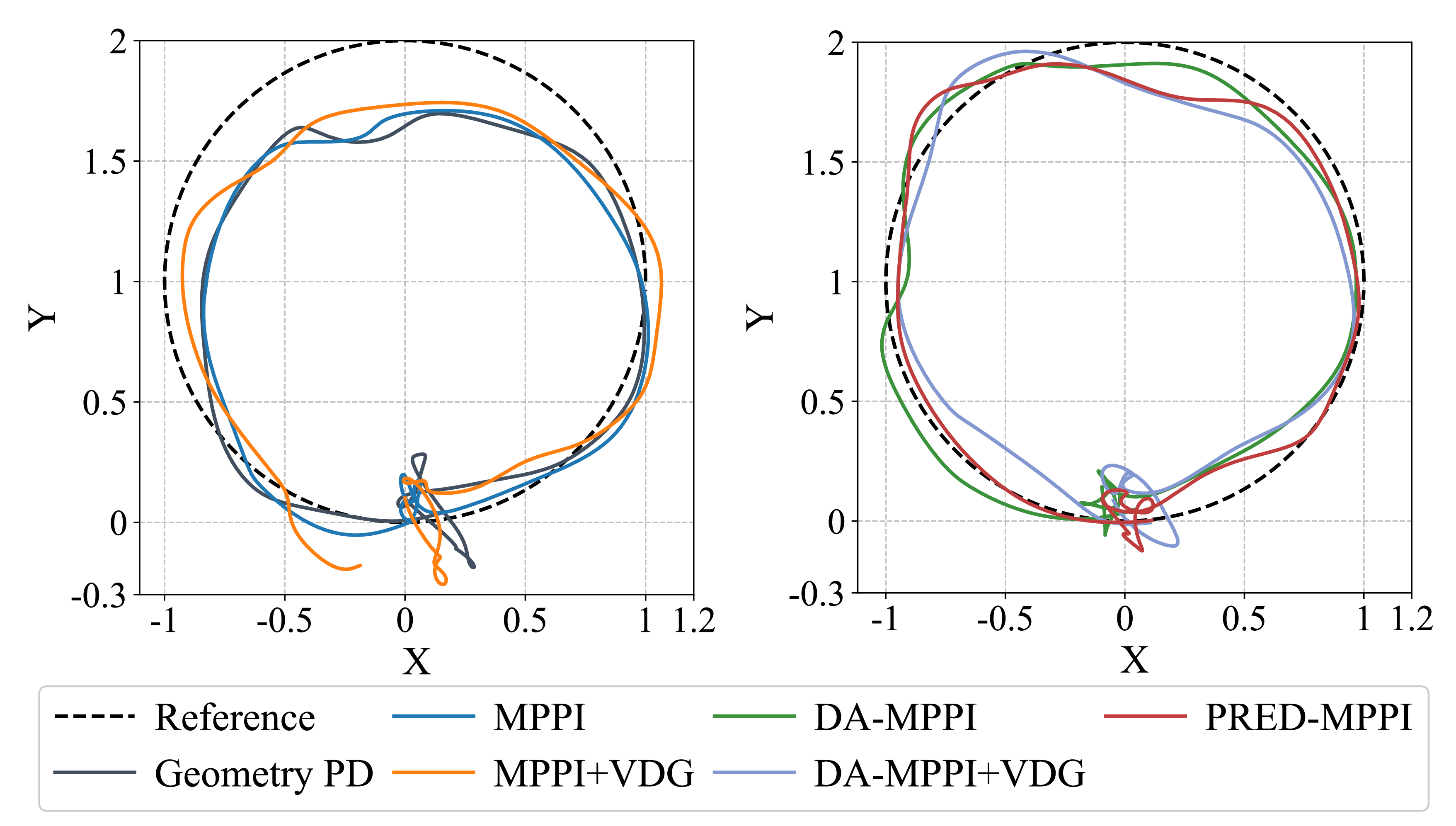
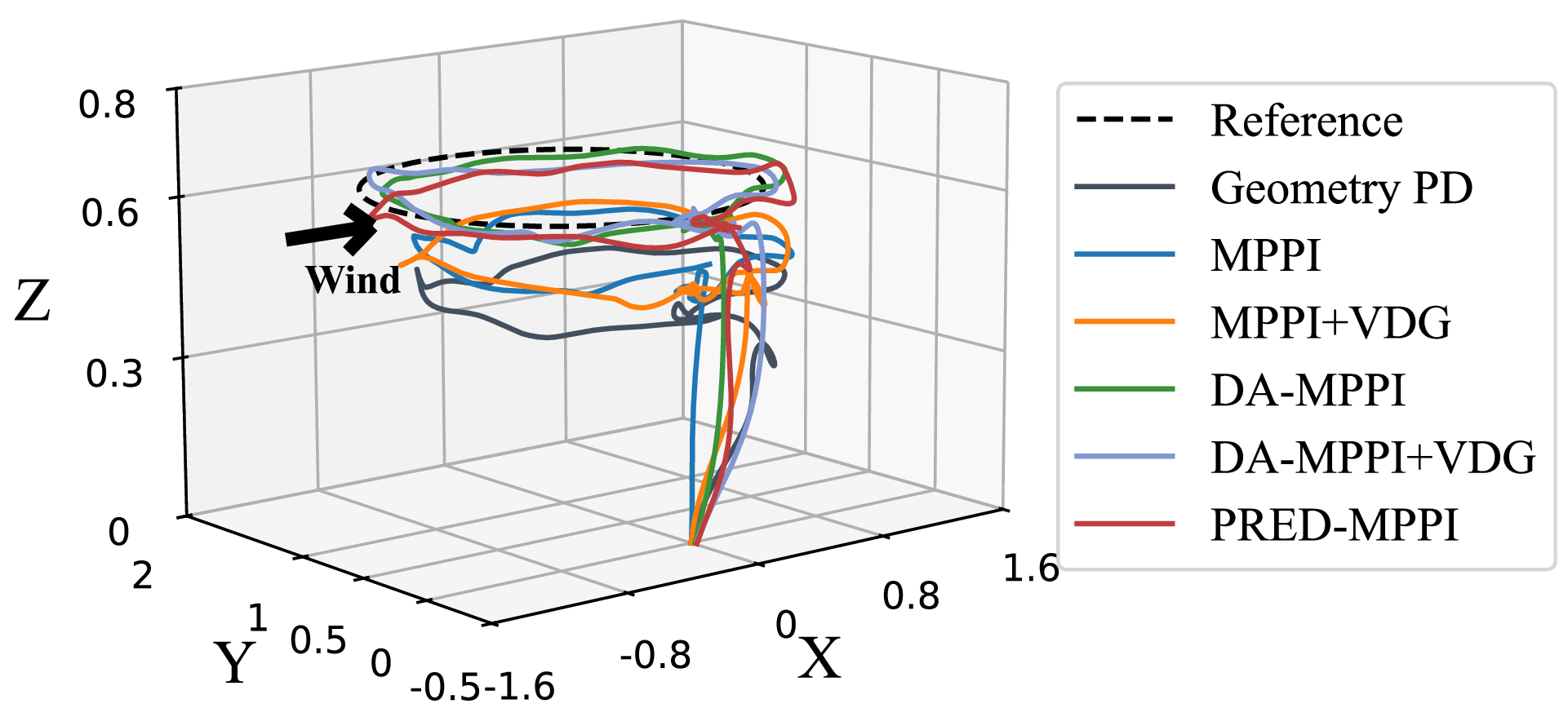
To further answer Q1 and Q2, we further consider two scenarios for concept validation: trajectory tracking in the presence of ground effect and circular trajectory tracking under fan-induced unknown time-varying wind disturbances. In hardware experiments, ground-truth states and position observations are obtained through Virtual-Reality Peripheral Network communication with a four-camera motion capture system (ChingMu MC1300). Exogenous wind disturbances are introduced using a miniature fan.
Geometry PD
MPPI
MPPI+VDG
DA-MPPI
DA-MPPI+VDG
PRED-MPPI
Geometry PD
DA-MPPI
MPPI
DA-MPPI+VDG
MPPI+VDG
PRED-MPPI